21.12.2022
News

Die Bildverarbeitungssoftware EyeVision von EVT, Karlsruhe, verspricht jetzt eine noch einfachere und intuitivere Hand-Eye-Kalibrierung für Roboter und Handhabungssysteme.
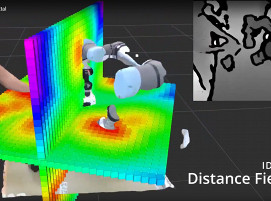
Der erweiterte Befehlssatz realisiert eine Hand-Eye-Kalibrierung mit nur wenigen Mausklicks bei Systemen in 2-D- und 3-D-Kameras und -Sensoren. Ebenfalls steht ein RoboCom-Befehl zu Verfügung, der die Kommunikation zu vielen Roboterherstellern ermöglicht, aber auch einfach an neue Roboter adaptierbar ist. Über diesen Befehl lassen sich auch zahlreiche Handlingsysteme ansteuern und adaptieren. Die Kombination aus Steuerung, Bildaufnahme in 2-D oder 3-D und der automatischen Adaption führt dazu, dass die Hand-Eye-Kalibrierung für das Roboterauge schnell und präzise realisiert werden kann. Das Ziel ist es, schnell und sicher dem Roboter das visuelle Greifen beizubringen.